Jetson Nano ROS Vision AI Part 3
Photo by Hunter Harritt on Unsplash
Live Video Inferencing Part 3 DetectNet⌗
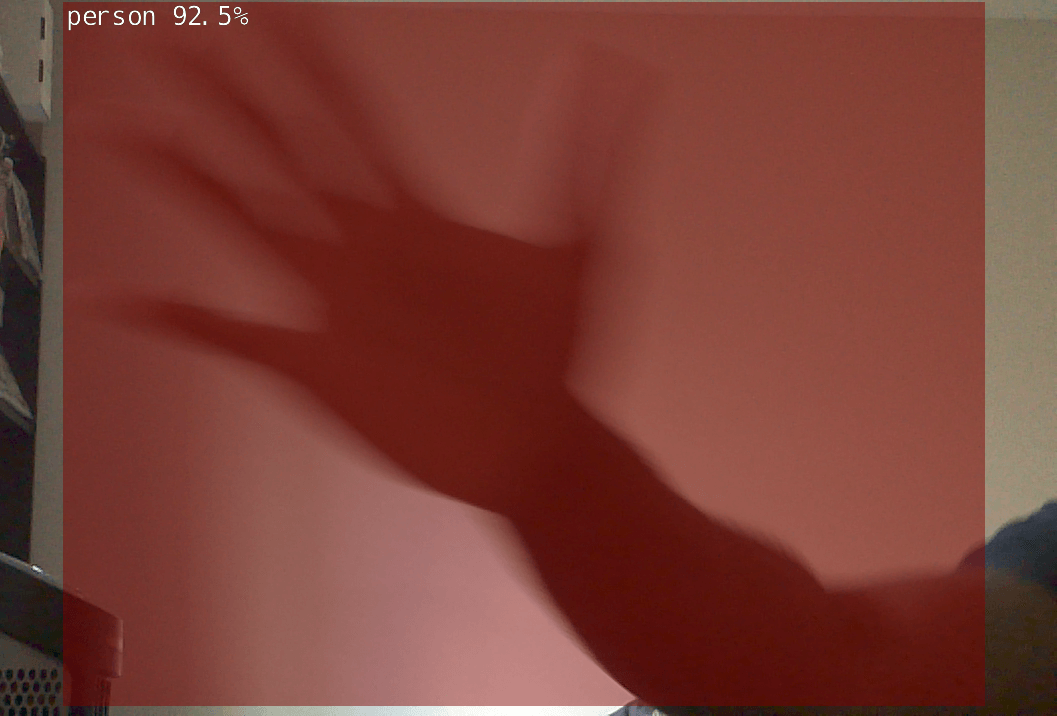
Our Goal: to create a ROS node that receives raspberry Pi CSI camera images, runs Object Detection and outputs the result as a message that we can view using rqt_image_view.
Object Detection⌗
We will be generating bounding boxes around objects detected in the image. Unlike image classification, the model can detect multilpe objects per image.
Pre-requisites⌗
Completed the previous post here
Live Video Inferencing (DetectNet)⌗
If you have completed the previous tutorial then this code will look very similar.
First lets put down some detectnet node code.
Create a file named node_imagetaker_detectnet.cpp in your <catkin-workspace-location>/<package-name>/src/ directory
And add the following to it, we will describe what each portion of the code does
Let’s add our needed imports
#include <iostream>
#include <ctime>
#include <sstream>
#include <ros/ros.h>
#include <image_transport/image_transport.h>
#include <cv_bridge/cv_bridge.h>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgcodecs.hpp>
#include <sensor_msgs/image_encodings.h>
#include <sensor_msgs/Image.h>
// the API to our segmentation model
#include <jetson-inference/detectNet.h>
// allows us to use the gpu for image operations
#include <jetson-utils/cudaMappedMemory.h>
#include <jetson-utils/loadImage.h>
#include "image_converter.h"
#include <unordered_map>
using namespace cv;
using namespace std;
- add our globals
// globals
detectNet* net = NULL;
// image converter object
imageConverter* cvt = NULL;
// where we will publish our results too
ros::Publisher* result_pub = NULL;
- Add our image callback that will be called when we receive a message from the camera publisher.
- This is where the image will be passed into the AI model for inferencing. We will also overlay the resulting bounding box here.
// input image subscriber callback
void img_callback( const sensor_msgs::ImageConstPtr& input )
{
ROS_INFO ("Received Image");
// convert sensor_msgs[rgb] to opencv[brg]
cv_bridge::CvImagePtr cv_ptr;
cv_bridge::CvImagePtr cv_ptr_flip; // pointer for flipped image
try
{
cv_ptr = cv_bridge::toCvCopy(input, sensor_msgs::image_encodings::BGR8);
cv_ptr_flip = cv_bridge::toCvCopy(input, sensor_msgs::image_encodings::BGR8);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("cv_bridge exception: %s", e.what());
return;
}
// we are doing a 180 deg flip since
// my camera is upside down
const int img_flip_mode_ = -1;
// flip the image
cv::flip(cv_ptr->image, cv_ptr_flip->image, img_flip_mode_);
// convert converted image back to a sensor_msgs::ImagePtr
// for use with nvidia / other ML algorithms
sensor_msgs::ImagePtr flippedImage = cv_ptr_flip->toImageMsg();
// convert the image TO reside on GPU
// the converting TO and converting FROM are the SAME funtion name
// with different signatures
if( !cvt || !cvt->Convert(flippedImage) )
{
ROS_ERROR (
"failed to convert %ux%u %s image",
flippedImage->width,
flippedImage->height,
flippedImage->encoding.c_str()
);
return;
}
else {
ROS_INFO (
"Converted %ux%u %s image",
flippedImage->width,
flippedImage->height,
flippedImage->encoding.c_str()
);
}
// classify the image
detectNet::Detection* detections = NULL;
/*
enum OverlayFlags
{
OVERLAY_NONE = 0, // < No overlay.
OVERLAY_BOX = (1 << 0), //< Overlay the object bounding boxes
OVERLAY_LABEL = (1 << 1), //< Overlay the class description labels
OVERLAY_CONFIDENCE = (1 << 2), //< Overlay the detection confidence values
};
*/
// detect AND render the all possible info i.e
// bounding box, label, confidence
const uint32_t flags = detectNet::OVERLAY_BOX | detectNet::OVERLAY_LABEL | detectNet::OVERLAY_CONFIDENCE;
const int numDetections = net->Detect(
cvt->ImageGPU(),
cvt->GetWidth(),
cvt->GetHeight(),
&detections,
flags
);
// if an error occured
if( numDetections < 0 )
{
ROS_ERROR(
"failed to run object detection on %ux%u image",
flippedImage->width,
flippedImage->height
);
return;
}
/*
// if no detections
if( numDetections == 0 )
{
ROS_INFO(
"detected %i objects in %ux%u image",
numDetections,
flippedImage->width,
flippedImage->height
);
return;
}
*/
// if objects were detected, send out message
if( numDetections >= 0 )
{
ROS_INFO(
"detected %i objects in %ux%u image",
numDetections,
flippedImage->width,
flippedImage->height
);
// get our image with overlays back from the GPU
// the converting TO and converting FROM are the SAME funtion name
// with different signatures
sensor_msgs::Image outputImage;
// outputImage.header.stamp = ros::Time::now();
if(!cvt || !cvt->Convert(outputImage, sensor_msgs::image_encodings::BGR8)) {
ROS_ERROR ("failed to convert outputImage image back");
return;
}
else {
ROS_INFO (
"Converted %ux%u %s image back",
outputImage.width,
outputImage.height,
outputImage.encoding.c_str()
);
}
// save the output image to png
sensor_msgs::ImagePtr out_img_ptr;
cv_bridge::CvImagePtr out_cv_img_ptr;
try
{
out_img_ptr = boost::make_shared<sensor_msgs::Image>(outputImage);
out_cv_img_ptr = cv_bridge::toCvCopy(
out_img_ptr,
sensor_msgs::image_encodings::BGR8
);
// publish image result
result_pub->publish(outputImage);
// save the image with the bounding box
// saveImage(&out_cv_img_ptr->image);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("cv_bridge exception: %s", e.what());
return;
}
}
}
- Finally our main function where we define our subscribers and publishers and initialize our node
int main (int argc, char **argv) {
ros::init(argc, argv, "imagetaker_detectnet");
ros::NodeHandle nh;
ros::NodeHandle private_nh("~");
std::string class_labels_path;
std::string prototxt_path;
std::string model_path;
// can change this to another model you have
// e.g rosrun <package-name> imagetaker_detectnet _model_name:=pednet
// "ssd-mobilenet-v2" is better than "pednet"!
std::string model_name = "ssd-mobilenet-v2";
float mean_pixel = 0.0f;
// If the desired objects aren't being detected in the video feed or
// you're getting spurious detections, try decreasing or increasing
// the detection threshold (default value is 0.5)
float threshold = 0.5f;
private_nh.param<std::string>(
"model_name",
model_name,
"ssd-mobilenet-v2"
);
// determine which built-in model was requested
detectNet::NetworkType model = detectNet::NetworkTypeFromStr(model_name.c_str());
if( model == detectNet::CUSTOM )
{
ROS_ERROR(
"invalid built-in pretrained model name '%s', defaulting to pednet",
model_name.c_str()
);
model = detectNet::PEDNET;
}
// create network using the built-in model
net = detectNet::Create(model);
if( !net )
{
ROS_ERROR("failed to load detectNet model");
return 0;
}
/*
* create the class labels parameter vector
*/
std::hash<std::string> model_hasher; // hash the model path to avoid collisions on the param server
std::string model_hash_str = std::string(
net->GetModelPath()) + std::string(net->GetClassPath()
);
const size_t model_hash = model_hasher(model_hash_str);
ROS_INFO("model hash => %zu", model_hash);
ROS_INFO("hash string => %s", model_hash_str.c_str());
// obtain the list of class descriptions
std::vector<std::string> class_descriptions;
const uint32_t num_classes = net->GetNumClasses();
for( uint32_t n=0; n < num_classes; n++ ) {
class_descriptions.push_back(net->GetClassDesc(n));
}
// create the key on the param server
std::string class_key = std::string("class_labels_") + std::to_string(model_hash);
// private_nh.setParam(class_key, class_descriptions);
// populate the vision info msg
std::string node_namespace = private_nh.getNamespace();
ROS_INFO("node namespace => %s", node_namespace.c_str());
/*
* create an image converter object
*/
cvt = new imageConverter();
if(!cvt)
{
ROS_ERROR("failed to create imageConverter object");
return 0;
}
/*
* advertise publisher topics
*/
ros::Publisher result_publsh = private_nh.advertise<sensor_msgs::Image>("image_detections", 2);
result_pub = &result_publsh;
/*
* subscribe to image topic
*/
ros::Subscriber img_sub = nh.subscribe(
"/csi_cam_0/image_raw",
5,
img_callback
);
/*
* wait for messages
*/
ROS_INFO("imagetaker node initialized, waiting for messages");
ros::spin();
return 0;
}
Full code looks like (here)[https://github.com/neil-okikiolu/jetson-nano-ros-vision-ai/blob/master/src/node_imagetaker_detectnet.cpp]
Then add the following to your <catkin-workspace-loaction>/<package-name>/CMakeLists.txt
add_executable(imagetaker_detectnet
src/node_imagetaker_detectnet.cpp
src/image_converter.cpp
)
target_link_libraries(imagetaker_detectnet ${catkin_LIBRARIES} jetson-inference)
Verify⌗
Run catkin_make to compile your code and make sure no errors show up
If any errors show up, make a comment and I will try to help you with it
In a terminal run
roscore
In another terminal run
# we are running at 1280x720 @ 24 FPS for now
roslaunch jetson_csi_cam jetson_csi_cam.launch sensor_id:=0 width:=1280 height:=720 fps:=24
# if your camera is in csi port 1 change sensor_id to 1
- NOTE: you may see a warning about a camera calibration file, you can ignore it
In a third terminal run
# to check if we are getting images from the camera
rostopic list
# you should see /csi_cam_0/camera_info or /csi_cam_1/camera_info
rostopic hz /csi_cam_<0 or 1>/camera_info
You should see something like:
average rate: 1.937
min: 0.516s max: 0.516s std dev: 0.00000s window: 2
average rate: 1.938
min: 0.515s max: 0.516s std dev: 0.00048s window: 4
average rate: 1.937
min: 0.515s max: 0.517s std dev: 0.00056s window: 6
average rate: 1.937
min: 0.515s max: 0.517s std dev: 0.00048s window: 8
average rate: 1.937
min: 0.515s max: 0.517s std dev: 0.00047s window: 10
average rate: 1.937
min: 0.515s max: 0.517s std dev: 0.00045s window: 12
average rate: 1.937
min: 0.515s max: 0.517s std dev: 0.00053s window: 14
...
In the third terminal Ctrl^c to stop the rostopic hz, now we will run our ROS node.
To specify a model, uncomment the string name for the model you want in the main() funtion
# specified model
rosrun <package-name> imagetaker_detectnet
In rqt_image_view click the drop down and select either imagetaker_detectnet/image_detections to see the image segmentation results in real-time!
This was long, thanks for staying till this point. Come back later for more image inferencing
If you have any tips or questions feel free to leave a comment!
Now we have learned how to use the pre made model classes (segnet, imagenet, detectnet)
Next time we will actually make a our own custom C++ model class for poseNet (Pose detection).
We will do a deep dive of Nvidia’s Tensor RT and Image Processing with CUDA.
See you then!
Notes⌗
- the first time you run the node, it has to optimize the model in Tensor RT so it will go on for a couple of minutes
- just Wait
- on your next run, the model is cached and it will not take long to start up
- use
rqt_image_viewto recieve images in real time- if you are running the nano remotely, use SSH with the
-Xflag for forwarding the UI - e.g
ssh -X mynano@192.123.456.789
- if you are running the nano remotely, use SSH with the
Links to source code⌗
Full source code available on github